
Danh mục sản phẩm
Sản phẩm mới






- Hotline tại Hà Nội
093.4619.456
- Hotline tại TP.HCM
090.188.4848
- Hotline tại Quảng Ninh
0988980308

Động cơ bước - Thiết kế hệ dẫn động khung phơi cho giàn phơi




* Động cơ bước
Động cơ bước là một loại động cơ điện có nguyên lý và ứng dụng khác biệt với đa số các loại động cơ điện thông thường. Chúng thực chất là một động cơ đồng
bộ dùng để biến đổi các tín hiệu điều khiển dưới dạng các xung điện rời rạc kế tiếp nhau thành các chuyển động góc quay hoặc các chuyển động của Rotor.
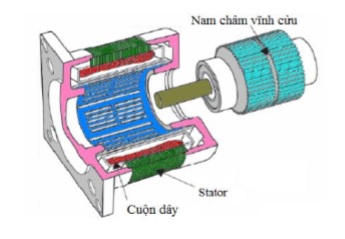
Hình 2.8. Cấu tạo động cơ bước
Động cơ bước được chia làm hai loại là động cơ nam châm vĩnh cửu và động cơ biến từ trở (cũng có loại động cơ hỗn hợp nữa, nhưng nó không khác biệt gì với động cơ nam châm vĩnh cửu). Động cơ nam châm vĩnh cửu có các nấc khi dùng tay xoay nhẹ rotor của chúng, trong khi động cơ biến từ trở thì dường như xoay tự do (mặc dù cảm thấy chúng cũng có những nấc nhẹ bởi sự giảm từ tính trong rotor). Có thể phân biệt hai loại động cơ này bằng ôm kế. Động cơ biến từ trở thường có 3 mấu, với một dây về chung, trong khi đó, động cơ nam châm vĩnh cửu thường có hai mấu phân biệt, có hoặc không có nút trung tâm. Nút trung tâm được dùng trong động cơ nam châm vĩnh cửu đơn cực.
|
Hình 2.9a. Cấu trúc động cơ bước nam châm vĩnh cửu |
Hình 2.9b. Cấu trúc động cơ bước biến từ trở |
Động cơ bước phong phú về góc quay. Các động cơ kém nhất quay 90 độ mỗi bước, trong khi đó các động cơ nam châm vĩnh cửu xử lý cao thường quay 1.8 độ đến 0.72 độ mỗi bước. Với một bộ điều khiển, hầu hết các loại động
cơ nam châm vĩnh cửu và hỗn hợp đều có thể chạy ở chế độ nửa bước, và một vài bộ điều khiển có thể điều khiển các phân bước nhỏ hơn hay còn gọi là vibước.
Đối với cả động cơ nam châm vĩnh cửu và động cơ biến từ trở, nếu chỉ một mấu của động cơ được kích, rotor (ở không tải) sẽ nhảy đến một góc cố định và sau đó giữ nguyên ở góc đó cho đến khi moment xoắn vượt qua giá trị moment xoắn giữ (hold torque) của động cơ.
Ngoài các loại động cơ phân tích ở trên thì còn có động cơ giảm tốc, động cơ rung, động cơ servo…
Từ việc phân tích các loại động cơ, ưu, nhược điểm của từng loại cũng như mục đích yêu cầu của đồ án chúng em là muốn điều khiển khung phơi lên xuống theo các mức có thể thay đổi được thông qua cài đặt số vòng quay của động cơ nên chúng em đã chọn lựa động cơ bước để dẫn động khung phơi.
2.1.3.1 Công suất cần thiết trên trục tang
Theo yêu cầu thiết kế, tải trọng nâng/hạ:
Suy ra, lực kéo lớn nhất trên Tang:
Với gia tốc trọng trường
Ta có:
Công suất trên trục tang:
Theo yêu cầu thiết kế, vận tốc nâng/hạ , ta có:
2.1.3.2 Xác định hiệu suất chung của toàn hệ thống
Hiệu suất chung của toàn hệ thống được xác định như sau:
Trong đó: là hiệu suất của chi tiết hoặc bộ truyền thứ i; k là số chi tiết hay bộ truyền thứ i đó:
Tra bảng 2.3 – Trang 19 – Tài liệu [5] về Trị số hiệu suất của các bộ truyền và ổ như bảng sau:
Bảng 2.5. Trị số hiệu suất của các loại bộ truyền và ổ
|
Tên gọi |
Hiệu suất |
|
của bộ |
truyền hoặc ổ |
|
|
Được che kín |
Để hở |
||||
|
Bộ truyền bánh răng trụ |
0,96 – 0,98 |
0.93 – 0.95 |
|||
|
Bộ truyền bánh răng côn |
0,95 – 0,97 |
0,92 – 0,94 |
|||
|
Bộ truyền trục vít |
|
|
|||
|
- Tự hãm |
0,30 – 0,40 |
0,2 – 0,3 |
|||
|
- Không tự hãm với Z1 = 1 |
0,70 – 0,75 |
|
|||
|
Z2 = 2 |
0,75 – 0,82 |
|
|||
|
Z3 = 4 |
0,87 – 0,92 |
|
|||
|
Bộ truyền xích |
0,95 – 0,97 |
0,9 – 0,93 |
|||
|
Bộ truyền bánh ma sát |
0,90 – 0,96 |
0,70 – 0,88 |
|||
|
Bộ truyền đai |
|
0,95 – 0,96 |
|||
|
Một cặp ổ lăn |
0,99 – 0,995 |
|
|||
|
Một cặp ổ trượt |
0,98 – 0,99 |
|
|||
Dựa vào bảng trên, ta xác định được các thông số như sau:
|
Tên gọi |
Kí hiệu |
Số lượng |
Giá trị chọn |
Ghi chú |
|
Hiệu suất khớp nối |
|
1 |
|
|
|
Hiệu suất 1 cặp ổ lăn |
|
1 |
|
|
|
Hiệu suất bộ truyền trục vít tự hãm được che kín |
|
1 |
|
|
|
Hiệu suất 1 cặp ổ trượt |
|
1 |
|
|
v Do đó:
2.1.3.3 Xác định công suất yêu cầu trên trục động cơ
Công suất yêu cầu trên trục động cơ điện:
2.1.3.4 Xác định vận tốc quay của trục tang
v Vận tốc quay của trục máy công tác định tính theo công thức sau:
Với là vận tốc nâng/hạ, theo yêu cầu thiết kế;
là đường kính danh nghĩa của Tang, theo tính toán ở trên .
v Do đó:
2.1.3.5 Xác định vận tốc quay cần thiết của độngcơ
v Vận tốc quay sơ bộ của động cơ cần có:
Trong đó:
+ là số vòng quay sơ bộ mà động cơ cần có
+ là vận tốc quay của trục tang. Đã được tính toán ở phần trên.
+ là tỉ số truyền sơ bộ của hệ thống
Ta sử dụng Bộ truyền trục vít – bánh vít để truyền động cho tang cuốn cáp. Dựa trên các bộ truyền trục vít – bánh vít trong cơ cấu nâng hạ trên thị trường và các bộ truyền trục vít – bánh vít được sử dụng trong hệ thống giàn phơi thông minh, ta lựa chọn:
Do đó:
v Từ ta chọn được tốc độ đồng bộ của động cơ điện:
v Theo các tính toán trên ta đã có:
Dựa vào số liệu trên, kết hợp với mục đích sử dụng cho giàn phơi thông minh, chúng em đã lựa chọn và đi mua loại động cơ bước kéo giàn phơi có các thông số như sau:
+ Điện áp 24 V
+ Dòng 2 A
+ 1,8 độ/ bước.
Bài viết liên quan
- CHẾ TẠO GIÀN PHƠI THÔNG MINH - KẾT LUẬN - (15/05/2018)
- Sơ đồ các mạch thiết kế thực hiện trong đề tài thiết kế giàn phơi điện tử - (15/05/2018)
- Trình biên dịch cho vi điều khiển KEILC 4, FLASH LOADER - (15/05/2018)
- Tổng quan về vi điều khiển STM32, biên dịch và nạp Code vào vi điều khiển - (13/05/2018)
- Hệ thống điều khiển động cơ bước - thiết kế chế tạo giàn phơi thông minh - (10/05/2018)
- Nguyên tắc hoạt động của Encoder - thiết kế chế tạo giàn phơi thông minh - (10/05/2018)
- Động cơ một chiều DC - thiết kế giàn phơi thông minh - (04/05/2018)
- Giới thiệu về sensor và các động cơ dùng trong hệ thống - thiết kế giàn phơi thông minh - (04/05/2018)
- THIẾT KẾ HỆ THỐNG ĐIỀU KHIỂN - CHẾ TẠO GIÀN PHƠI THÔNG MINH - (03/05/2018)
- Tính chọn ổ bi - thiết kế giàn phơi thông minh - (03/05/2018)
